")
Taula de continguts:
- Pas 1: problema teòric
- Pas 2: utilitzar la llei de Snell per demostrar
- Pas 3: model d’experiment pràctic
- Pas 4: materials necessaris
- Pas 5: impressió 3D
- Pas 6: tall per làser dels camins
- Pas 7: Tallar la fusta
- Pas 8: perforació dels forats
- Pas 9: incrustar els dissipadors de calor i els imants
- Pas 10: connectar els interruptors de límit
- Pas 11: pantalla LCD
- Pas 12: Cablatge de l'electrònica
- Pas 13: càrrega del codi
- Pas 14: les guies d'impressió en 3D
- Pas 15: Afegir el tap i la unitat de sincronització
- Pas 16: el mecanisme d'alliberament
- Pas 17: l'experiment
- Pas 18: Conclusió
- Autora John Day day@howwhatproduce.com.
- Public 2024-01-30 08:13.
- Última modificació 2025-01-23 14:37.




La corba de braquistocrona és un problema de física clàssic, que deriva el camí més ràpid entre dos punts A i B que es troben a diferents elevacions. Tot i que aquest problema pot semblar senzill, ofereix un resultat contraintuïtiu i, per tant, és fascinant de veure. En aquest instructable es coneixerà el problema teòric, es desenvoluparà la solució i, finalment, es construirà un model que demostri les propietats d’aquest sorprenent principi de la física.
Aquest projecte està dissenyat per als estudiants de secundària perquè cobreixen conceptes relacionats a les classes de teoria. Aquest projecte pràctic no només reforça la seva comprensió sobre el tema, sinó que també ofereix una síntesi d'altres camps a desenvolupar. Per exemple, mentre construeixen el model, els estudiants aprendran sobre òptica mitjançant la llei de Snell, la programació d’ordinadors, el modelatge en 3D, la frabricació digital i les habilitats bàsiques per treballar la fusta. Això permet que tota una classe contribueixi dividint el treball entre ells, convertint-lo en un esforç en equip. El temps necessari per fer aquest projecte és aproximadament d’una setmana i es pot demostrar a la classe o als estudiants més joves.
No hi ha cap millor manera d’aprendre que mitjançant STEM, així que seguiu per fer el vostre propi model de braquistocrona. Si us agrada el projecte, voteu-lo al concurs d’aula.
Pas 1: problema teòric


El problema de la braquistocrona és aquell que gira al voltant de trobar una corba que uneix dos punts A i B que es troben a diferents elevacions, de manera que B no es troba directament per sota de A, de manera que deixar caure un marbre sota la influència d’un camp gravitatori uniforme al llarg d’aquest camí arribeu a B en el menor temps possible. El problema fou plantejat per Johann Bernoulli el 1696.
Quan Johann Bernoulli va preguntar el problema de la braquistocrona, el juny de 1696, als lectors d'Acta Eruditorum, que va ser una de les primeres revistes científiques de les terres de parla alemanya d'Europa, va rebre respostes de 5 matemàtics: Isaac Newton, Jakob Bernoulli, Gottfried Leibniz, Ehrenfried Walther von Tschirnhaus i Guillaume de l'Hôpital tenen aproximacions úniques.
Alerta: els passos següents contenen la resposta i revelen la bellesa que hi ha darrere d’aquest camí més ràpid. Preneu-vos un moment per provar de pensar en aquest problema, potser el tracteu com un d’aquests cinc genis.
Pas 2: utilitzar la llei de Snell per demostrar

Un dels enfocaments per resoldre el problema de la braquistocronia és abordar el problema traient analogies amb la llei de Snell. La llei de Snell s’utilitza per descriure el camí que seguiria un feix de llum per arribar d’un punt a un altre mentre transitava per dos suports diferents, utilitzant el principi de Fermat, que diu que un feix de llum sempre prendrà la ruta més ràpida. Podeu trobar una derivació formal d’aquesta equació visitant el següent enllaç.
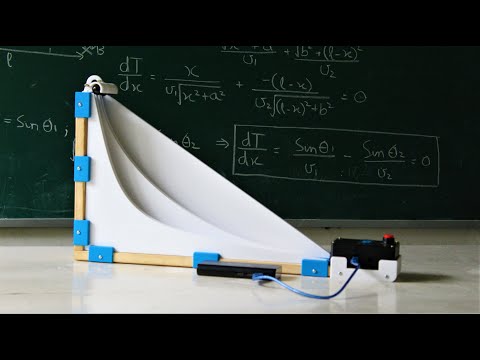
Atès que un objecte de caiguda lliure sota la influència del camp gravitatori es pot comparar amb un feix de llum que transita a través de suports canviants, cada vegada que el feix de llum es troba amb un nou mitjà, el feix es desvia lleugerament. L'angle d'aquesta desviació es pot calcular mitjançant la llei de Snell. Mentre es continua afegint capes de densitats reductores davant del feix de llum desviat, fins que el feix arriba a l’angle crític, on el feix es reflecteix simplement, la trajectòria del feix descriu la corba de braquistocrona. (la corba vermella del diagrama superior)
La corba braquistocrona és de fet una cicloide que és la corba traçada per un punt a la vora d'una roda circular mentre la roda roda per una línia recta sense relliscar. Per tant, si hem de dibuixar la corba, es pot utilitzar simplement el mètode anterior per generar-la. Una altra propietat única de la corba és que una bola alliberada des de qualsevol punt de la corba trigarà exactament el mateix temps a arribar al fons. Els passos següents descriuen el procés de fer un experiment a l'aula mitjançant la construcció d'un model.
Pas 3: model d’experiment pràctic

El model consisteix en camins de tall de lasercas que actuen com a pistes per als marbres. Per demostrar que la corba de braquistocrones és el camí més ràpid del punt A al B, hem decidit comparar-lo amb altres dos camins. Com que molta gent sentia intuïtivament que la part més curta és la més ràpida, vam decidir posar un pendent recte que connectés els dos punts com el segon camí. La tercera és una corba pronunciada, ja que es podria sentir que la caiguda sobtada generaria prou velocitat per superar la resta.
El segon experiment en què les boles s’alliberen des de diferents altures en tres camins de braquistocrones, té com a resultat que les boles arribin al mateix temps. Per tant, el nostre model compta amb guies impreses en 3D que proporcionen una fàcil intercanviabilitat entre els panells acrílics que permeten realitzar els dos experiments.
Finalment, el mecanisme d'alliberament garanteix que les boles es caiguin juntes i que el mòdul de sincronització de la part inferior registri els temps a mesura que les boles arribin al fons. Per aconseguir-ho, hem incrustat tres interruptors de límit que s’activen quan les boles l’activen.
Nota: Simplement es podria copiar aquest disseny i fer-lo amb cartró o altres materials fàcilment disponibles
Pas 4: materials necessaris



A continuació, es detallen les parts i subministraments per fer un model de treball de l’experiment de la braquistocrona
HARDWARE:
Tauló de fusta de pi de 1 ": dimensions; 100cm per 10cm
Neodimi Magnetx 4: dimensions; 1cm de diàmetre i 0,5cm d’alçada
Els filaments d’impressió 3D: PLA o ABS estan bé
Inserció roscada M3 x 8 - (opcional)
Pernell M3 x 8 - 2,5cm de llarg
Cargol de fusta x 3 - 6cm de llarg
Wood Screwx de 12 a 2,5cm de llarg
ELECTRONNICA:
Arduino Uno
Limit Switchx 4: aquests interruptors actuaran com el sistema de sincronització
Polsador
Pantalla LCD
Jumpwire x molts
El cost total del model va ser d’uns 3 0 $
Pas 5: impressió 3D


Diverses parts, com el mecanisme d'alliberament i la caixa de control, es van fabricar amb l'ajuda d'una impressora 3D. La llista següent conté el nombre total de peces i les seves especificacions d’impressió. Tots els fitxers STL es proporcionen a una carpeta adjunta a dalt, que permet fer les modificacions necessàries si cal.
Caixa de control x 1, 20% d'ompliment
Guia x 6, 30% d’ompliment
Finalitza la parada x 1, un 20% d’ompliment
Braç pivot x 1, 20% de farciment
Muntatge pivot x 1, farcit del 30%
Llançament de la peça x 1, un 20% d’ompliment
Les peces es van imprimir en PLA ja que no hi ha cap tensió especial que actuï sobre les peces. En total van trigar unes 40 hores a imprimir.
Pas 6: tall per làser dels camins

Els diversos camins que vam dissenyar a fusion 360 es van exportar com a fitxers.dxf i després es van tallar amb làser. Vam triar acrílic blanc opac amb un gruix de 3 mm per fer les corbes. Fins i tot es pot fer de fusta amb eines manuals, però és important assegurar-se que el material escollit sigui rígid, ja que la flexibilitat pot afectar la forma en què les boles roden cap avall.
6 x corba de brachistochrone
2 x corba inclinada
2 x Corba recta
Pas 7: Tallar la fusta


El marc del model està fet de fusta. Vam triar 1 "per 4" de pi, ja que ens quedaven algunes d'un projecte anterior, tot i que es pot utilitzar una fusta que triïn. Amb una serra circular i una guia tallem dos trossos de fusta de longitud:
48cm que és la longitud del camí
31cm que és l’alçada
Vam netejar les vores rugoses lleugerament a la polidora de discs.
Pas 8: perforació dels forats



Abans de cargolar les dues peces, marqueu el gruix de la fusta en un extrem de la peça inferior i centreu tres forats equidistants. Hem utilitzat una broca de 5 mm per crear un forat pilot en ambdues peces de fusta i hem forat el forat de la peça inferior per permetre accionar el cap del cargol a ras.
Nota: tingueu cura de no dividir el tros vertical de fusta, ja que es perforarà al gra final. Utilitzeu també cargols de fusta llargs, ja que és important que el marc no tremoli i la part superior a causa de l’apalancament.
Pas 9: incrustar els dissipadors de calor i els imants



Com que els fils de les peces impreses en 3D tendeixen a desgastar-se amb el pas del temps, vam decidir incrustar dissipadors de calor. Els forats tenen una mica de mida inferior per permetre que el dissipador de calor adquireixi millor el plàstic. Vam col·locar dissipadors de calor M3 sobre els forats i els vam empènyer amb la punta d'un soldador. La calor fa fondre el plàstic i deixa que les dents s’encunyin. Assegureu-vos que estan a ras de la superfície i que han entrat perpendicularment. En total, hi ha 8 punts per a les insercions roscades: 4 per a la tapa i 4 per muntar l’Arduino Uno.
Per facilitar el muntatge de la unitat de cronometratge, hem incorporat imants a la caixa, cosa que facilita la seva separació si mai es necessiten canvis. Els imants han d’orientar la mateixa direcció abans d’empènyer-los al seu lloc
Pas 10: connectar els interruptors de límit



Els tres interruptors de límit estan connectats a un costat de la unitat de temps que dóna a la part inferior dels camins. Així, quan les boles fan clic als interruptors, es pot determinar quina bola va arribar primer i mostrar el temps en una pantalla LCD. Soldeu les tires de filferro a les terminals i fixeu-les a les ranures amb una mica de cola CA perquè no s’afluixin després de cops continus.
Pas 11: pantalla LCD




La tapa de la unitat de temporització té un retall rectangular per a la pantalla LCD i un forat per al botó "Inici". Vam assegurar la pantalla amb pals de cola calenta fins que va quedar a ras de la superfície de la tapa i vam fixar el botó vermell amb la seva femella de muntatge.
Pas 12: Cablatge de l'electrònica



El cablejat consisteix a connectar els diferents components als pins de l'Arduino. Seguiu el diagrama de cablejat adjunt anterior per configurar el quadre.
Pas 13: càrrega del codi




A continuació es troba el codi Arduino per al projecte de braquistocrones. Hi ha dues obertures al compartiment electrònic per facilitar l'accés al port de programació d'Arduino i per a la presa d'alimentació.
El botó vermell que s’adjunta a la part superior de la caixa s’utilitza per iniciar el temporitzador. Una vegada que els marbres fan rodar les corbes i activen els interruptors de límit, que es col·loquen a la part inferior, es registren els temps de manera seqüencial. Després de tocar les tres boles, la pantalla LCD mostra els resultats, alineats amb les respectives corbes (imatges adjuntes més amunt). Un cop hàgiu observat els resultats en cas que es requereixi una segona lectura, només cal que torneu a prémer el botó principal per actualitzar el temporitzador i repetir el mateix procés.
Pas 14: les guies d'impressió en 3D




Les guies impreses en 3D tenien una base de material de 3 mm abans de començar les parets de suport. Per tant, quan els panells acrílics es col·locarien al seu lloc, hi hauria un buit entre el panell i el marc de fusta, disminuint la fermesa del camí.
Per tant, la guia necessitava estar incrustada per 3 mm a la fusta. Com que no teníem un encaminador, el vam portar a un taller local i el vam fer amb una fresadora. Després d'una mica de poliment, les impressions van quedar perfectes i podríem assegurar-les amb cargols de fusta del costat. Adjunt a sobre hi ha una plantilla per col·locar les 6 guies al marc de fusta.
Pas 15: Afegir el tap i la unitat de sincronització




Com que el mòdul de sincronització era un sistema separat, vam decidir fer un sistema ràpid de muntatge i separació mitjançant imants. D'aquesta manera, es pot programar fàcilment, simplement traient la unitat. En lloc de fer una plantilla per transferir la posició dels imants que cal inserir a la fusta, simplement deixem que es connectin als de la caixa i després posem una mica de cola i col·loquem la caixa sobre el tros de fusta. Les marques de cola es van transferir a la fusta, cosa que ens permet forar ràpidament els forats en els punts exactes. Finalment, poseu el tap imprès en 3D i la unitat de sincronització hauria d’encaixar perfectament, tot i que es podria desprendre amb una lleugera estirada
Pas 16: el mecanisme d'alliberament



El mecanisme d'alliberament és senzill. Utilitzeu una rosca i un cargol per connectar estretament la secció C al braç de pivot, convertint-les en una peça segura. A continuació, practiqueu dos forats al mig de la fusta vertical i fixeu el muntatge. Feu lliscar un eix pivotant i el mecanisme està complet.
Pas 17: l'experiment


Ara que el model està llest, podeu fer els següents experiments
Experiment 1
Feu lliscar amb cura els panells acrílics del recorregut recte, la corba de braquistocrona i el recorregut inclinat (en aquest ordre per obtenir el millor efecte). A continuació, estireu el pestell i col·loqueu les tres boles a la part superior de la corba assegurant-vos que estiguin perfectament alineades entre si. Mantingueu-los ben fixats amb el pestell cap avall. Feu que un alumne deixi anar les boles i que un altre premi el botó vermell per iniciar el sistema de cronometratge. Finalment, observeu com les boles roden pel camí i analitzeu els resultats que es mostren al mòdul de cronometratge. Configurar una càmera per gravar imatges de càmera lenta és encara més emocionant, ja que es pot veure la cursa fotograma per fotograma.
Experiment 2
Igual que l'experiment anterior, llisqueu als panells acrílics, però aquesta vegada tots els camins han de ser la corba de brachistonchrone. Demaneu acuradament a un estudiant que mantingui les tres boles a diferents elevacions aquesta vegada i premeu el botó vermell mentre es deixin anar les boles. Mireu el moment sorprenent que les pilotes s’alineen perfectament abans de la meta i confirmeu les observacions amb els resultats.
Pas 18: Conclusió

La fabricació del model de braquistocrones és una manera pràctica de veure les maneres màgiques en què funciona la ciència. Els experiments no només són divertits de veure i atractius, sinó que també ofereixen una síntesi d’aspectes d’aprenentatge. Tot i que principalment és un projecte destinat a estudiants de secundària, tant pràcticament com teòricament, aquesta demostració pot ser fàcilment captada pels nens més petits i es pot mostrar com una presentació simplificada.
Ens agradaria animar la gent a crear coses, ja sigui un èxit o un fracàs, perquè al final del dia STEM sempre és divertit. Feliç fer!
Voteu un vot al concurs d’aula si us agradaven els instructius i deixeu els vostres comentaris a la secció de comentaris.


Gran Premi al Concurs de Ciències de l’Aula
Recomanat:
Tractor de la corba del transistor: 7 passos (amb imatges)
")
Transistor Curve Tracer: Sempre he volgut un traçador de corbes de transistor. És la millor manera d’entendre el que fa un dispositiu. Després d’haver-lo construït i utilitzat, finalment entenc la diferència entre els diferents sabors de FET. És útil per fer coincidir els transistors mesurats
I - V Corba amb Arduino: 5 passos

Corba I - V amb Arduino: vaig decidir crear una corba I-V de leds. Però només tinc un multímetre, de manera que vaig crear un comptador I-V senzill amb Arduino Uno
Corba d’aprenentatge amb LED blanc: 5 passos

Corba d’aprenentatge del LED blanc: necessitava una llum brillant Intentava solucionar alguna cosa i necessitava una llum millor per determinar una mica de plàstic negre d’un altre en un espai reduït … i què millor que un LED blanc fred súper brillant (emissora de llum) Diode)? Afortunadament, Chri
Fader analògic altern altern discret amb corba de brillantor lineal: 6 passos (amb imatges)
")
Fader analògic altern altern discret amb corba de brillantor lineal: la majoria dels circuits per esvair / atenuar un LED són circuits digitals que utilitzen una sortida PWM d’un microcontrolador. La brillantor del LED es controla canviant el cicle de treball del senyal PWM. Aviat descobrireu que quan canvieu linealment el cicle de treball
Configuració doble de TV corba de 55 polzades per a monitor de PC: 6 passos (amb imatges)
")
Configuració doble de TV corba de 55 polzades per a monitor de PC: aquí teniu la configuració doble de TV Samsung de 55 polzades corba per a la meva estació de treball. Més endavant donaré la configuració de la paret de la TV triple. Subscriu-te si t'agrada