")
Taula de continguts:
- Autora John Day day@howwhatproduce.com.
- Public 2024-01-30 08:13.
- Última modificació 2025-01-23 14:37.




Motivació
M'agraden molt les visualitzacions POV (persistència de la visió). No només són interessants de mirar, sinó també un gran repte per desenvolupar-los. És una tasca realment interdisciplinària. Necessiteu moltes habilitats: mecànica, electrònica, programació, etc.
Sempre he volgut construir el meu propi i fer-lo el més gran i el més capaç possible. Fa un any que ho vaig fer! Va ser molta feina i molt complex de fer. M’agraden aquest tipus de reptes. Així que va ser divertit;-)
Ara també vull que en creïs un. Podeu prendre-ho com a guia per desenvolupar-ne el vostre o simplement seguir les instruccions per obtenir una còpia de la meva pantalla POV. Intentaré assenyalar tots els reptes que vaig haver de superar per fer-los meus.
Vaig repetir el disseny per facilitar la reconstrucció el més fàcil possible. No hi ha components SMT i tot hauria de ser soldable pels principiants. No m’equivoqueu, encara és un repte molt gran muntar-ho tot. Però hauria de ser factible.
ADVERTÈNCIA: aquest projecte conté LEDs que s’actualitzen a gran velocitat i que poden provocar convulsions per a persones amb epilèpsia fotosensible
Com funciona?
Aquí podeu llegir com funciona una pantalla POV en general.
Primerament necessitem una font que emeti un senyal de vídeo. Al disseny original ho vaig fer per WIFI. Vaig escriure un programa per capturar la pantalla d’un ordinador i enviar aquestes dades a un ESP8266 mitjançant WIFI. El problema d’aquest enfocament és que l’ESP8266 era massa lent i l’amplada de banda WIFI era suficient per a 16 FPS. Ara fem servir un ESP32. Pensava que tots els problemes estaven solucionats, però va resultar que l’ESP32 tampoc ofereix més amplada de banda a través de WIFI que l’ESP8266. L'ESP32 té prou potència computacional per descodificar un flux de vídeo. Així que vaig acabar enviant imatges JPEG per WIFI a l’ESP32. Per tant, l’ESP32 allotja un lloc web. En aquest lloc podeu seleccionar imatges o vídeos i el lloc web transmetrà JPEG a l'ESP32. La descodificació JPEG necessita molta memòria, de manera que també hi tenim un problema. Però funciona de moment. Potser tindré una millor solució més endavant.
A continuació, hem de controlar ells mateixos els LED. Perquè això funcioni, hem de conèixer la posició exacta dels LED en cada moment. Per tant, he afegit un sensor d'efecte Hall. A cada rotació passa un imant i, per tant, permet la detecció. A continuació, mesurem el temps de la rotació. Suposem que la següent rotació trigarà el mateix temps. Per tant, podem calcular la nostra posició. Aquest procés es repeteix una vegada i una altra. Per controlar els LED utilitzem un FPGA. També podríem utilitzar un microprocessador, però probablement serà massa lent. Cal actualitzar els LED més externs unes 10.000 vegades per segon. Un FPGA compleix fàcilment la tasca i ho farà amb menys fluctuacions.
Si els LED s’han d’actualitzar tan sovint, també necessitarem els LED ràpids. Al meu disseny original feia servir LED APA102. Tenen una freqüència d’actualització d’uns 20KHz. Vaig intentar aconseguir tires de LED amb aquests LED, però el venedor en línia em va enviar SK9822 i em va dir que són iguals (va passar dues vegades …) Així que farem servir el SK9822. Només tenen una freqüència d’actualització de 4,7 kHz, però esperem que n’hi hagi prou. També tenen un protocol una mica diferent. Només tingueu en compte. Així doncs, l’ESP32 empeny els marcs d’imatges a l’FPGA. El FPGA controla els LED.
Ara els LED només han de girar. Per tant, fem servir un motor de corrent continu. Aquest motor es controla a través d’un senyal PWM des d’un ESP8266. L'ESP8266 també està connectat per WIFI a l'ESP32. Per tant, només necessitem un sensor per mesurar la velocitat de rotació. En el disseny original n'he utilitzat dos.
Al meu vídeo sobre el disseny original es pot trobar més informació sobre el sistema.
Eines
He utilitzat les eines següents:
- Impressora 3D
- Soldadura de ferro
- Cola calenta
- Super cola
- Cable micro USB
- Tisores
- Trepant + trepant de fusta 3 4 8 i 12mm
- Tornavís
- Alicates planes
- Tallador lateral
- Decapant de filferro
- Subministraments de pintura
- Paper de sorra
Comanda
Vaig obrir una botiga TINDIE. Així que podeu comprar un kit si voleu i ajudeu-me a fer més projectes com aquest;-)
SST
Com sempre, tot el que veieu aquí es publica com a codi obert.
Actualitzacions
Hi ha algunes coses que vull millorar en el futur:
-
Resolució de color més alta de 12 bits a 24 bits => per tant, necessitem un FPGA amb més RAM =>
Cmod A7, són compatibles amb pins:-)
- ESP32 amb PSRAM per evitar problemes de memòria
- Solucioneu el problema del pinzell …
Subministraments
Peces a mida
Els heu de demanar o demanar-me un kit.
1 * PCB principal (els fitxers gerber es troben a la carpeta gerber main.zip)
1 * PCB del controlador de motor (els fitxers gerber es troben a la carpeta gerber motor.zip)
4 * Corners 3D 1 Print (el fitxer stl es troba a la carpeta 3D corner.stl)
1 * Impressió principal del suport de PCB 3 (els fitxers stl es troben a la carpeta 3D holder1.stl, holder2.stl, holder3.stl)
1 * Brush Holder 3D 2 Print (els fitxers stl es troben a la carpeta 3D brush1.stl i brush2.stl)
Parts estàndard
Aneu amb compte, alguns dels enllaços inclouen 10 o fins i tot 100 paquets.
1m * SK9822 Tira LED amb 144 LED / m
1 * Cmod S6 FPGA
1 * Desenvolupament ESP32 de 30 pins Geekcreit
1 * Geekcreit D1 mini V2.2.0 ESP8266
4 * 74HCT04
5 * DC-DC 5V 4A
1 * Motor DC 775
44 * 100nf 50V
9 * 220uf 16V
10 * Imant de neodimi 10mmx2mm
1 * sensor d'efecte Hall
2 * Carbon Bruches Dremel 4000
2 * Raspalls de carboni per a motors
2 * Rodaments 6803ZZ
2 * Muntatge del motor 775
2 * presa DC 5,5 x 2,1 mm
1 * font d'alimentació
1 * botó de 8 mm
2 * XT30PB endoll PCB mascle i femella
2 * Cable macho i femella d'endoll XT30
Resistència de 2 * 130Ohm 1 / 4W
2 * MOSFET IRF3708PBF
2 * 1N5400
1 * Capçalera de pin d'una sola fila
1 * Capçalera femenina
1 * Cable 30AWG
1 * Cable 22AWG
Ferreteria
1 * MDF 500 mm x 500 mm x 10 mm
1 * MDF 100 mm x 500 mm x 10 mm
4 * MDF 200 mm x 510 mm x 10 mm
1 * vidre acrílic 500 mm x 500 mm x 2 mm
12 * Racó metàl·lic 40mm x 40mm x 40mm
40 * cargol de fusta de 3 mm x 10 mm
6 * M3 espaiador de 12 mm
Cargols M3 i M4
3m * Cable de 2,5 mm2 de fil simple / rígid
Pintura negra per a la fusta MDF
Temps de construcció: ~ 10 hores
Cost de construcció: ~ 300 €
Pas 1: baixeu fitxers

Per començar, primer hem de descarregar tot el necessari per a aquest projecte.
Aneu a la pàgina de llançament del dipòsit aquí.
A continuació, descarregueu Release.zip de l'última versió i descomprimiu-lo a l'ordinador.
Cada vegada que faig referència a un fitxer d’aquest manual, el trobareu allà;-)
Pas 2: programa del microprogramari
Pas 2.1: programa FPGA
Per programar el FPGA hem d’instal·lar un programari de xilinx:
Per a Windows 10 cal instal·lar: ISE Design Suite per a Windows 10 (~ 7 GB)
Per a Windows 7 o XP podeu instal·lar: Eines de laboratori (~ 1 GB)
Després d'instal·lar Open ISE iMPACT i fer clic a "No" si se us demana i també a "Cancel·la" per obtenir un nou formulari de projecte. Connecteu la placa FPGA Cmod S6 i espereu que s’instal·lin els controladors. Feu doble clic a l'escaneig de límits. A continuació, feu clic amb el botó dret a la nova finestra i trieu "Inicialitza la cadena". Torneu a fer clic a "No" i tanqueu el formulari nou. Ara hauríeu de veure un símbol "SPI / BPI", feu-hi doble clic. Trieu el fitxer "SPIFlash.mcs". Al nou formulari, trieu "SPI PROM" i "S25FL128S" i Amplada de dades "4". Feu clic a "D'acord". A continuació, feu clic un altre cop al símbol "FLASH". Ara hauria de ser verd. A continuació, premeu "Programa". Feu clic a "D'acord" al formulari nou i espereu. Això pot trigar uns minuts.
Ben fet, l'FPGA està a punt;-) Ja el podeu desconnectar.
Pas 2.2: programa ESP32
Instal·leu el nucli esp32 a l’identificador d’Arduino; podeu seguir aquest tutorial. Es recomana V1.0.2.
Biblioteques necessàries:
- AutoPID de Ryan Downing V1.0.3 (es pot instal·lar al gestor de la biblioteca)
- ArduinoWebsockets de Gil Maimon, modificat per mi (descarregueu el fitxer zip i instal·leu-lo)
Obriu el fitxer povdisplay.ino a la carpeta povdisplay.
Trieu a sota del tauler d’eines: "DOIT ESP32 DEVKIT V1". Deixeu la resta de configuracions tal com estan.
Connecteu la placa esp32 per USB i descarregueu el programa.
Pas 2.3: programa ESP8266
Instal·leu el nucli ESP8266 a l’identificador Arduino, podeu seguir aquest tutorial.
No calen biblioteques.
Obriu el fitxer motordrive.ino a la carpeta motordrive.
Trieu a Tauler d'eines: "Mòdul ESP8266 genèric". Deixeu la resta de configuracions tal com estan.
Connecteu la placa esp8266 per USB i descarregueu el programa.
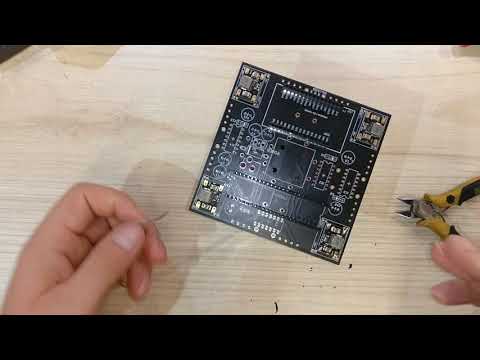
Pas 3: soldar els PCB




PAS 3.1 PCB del controlador del motor de soldadura
Es solden els components següents:
-
WEMOS1 (Geekcreit D1 mini V2.2.0 ESP8266)
- Soldeu les capçaleres dels pins al tauler WEMOS
- Soldeu les capçaleres femenines del PCB
-
DCDC (DC-DC 5V 4A)
- Utilitzeu 4 pins per formar la capçalera del pin i soldeu el convertidor DC-DC directament a la placa
- Aneu amb compte amb l’orientació, perquè coincideixi amb la pantalla de seda
- CN1 (presa DC 5,5 x 2,1 mm)
-
1N5400
Aneu amb compte amb l'orientació, la línia blanca del díode ha d'estar al mateix costat que la línia de la pantalla de seda
-
220u (220uf 16V)
Aneu amb compte amb l’orientació, la línia blanca ha d’estar al costat oposat del plus a la pantalla de seda
- R1 i R1 (resistència de 130 Ohm 1 / 4W)
-
Q1 i Q2 (MOSFET IRF3708PBF)
Aneu amb compte amb l’orientació, la part posterior metàl·lica ha d’estar al costat amb la línia gruixuda de la serigrafia
-
MOTOR (PCB femella endoll XT30PB)
Aneu amb compte amb l'orientació, l'extrem rodó ha d'estar al costat marcat a la pantalla de seda
-
LEDS i TASTER (PCB macho endoll XT30PB)
Aneu amb compte amb l'orientació, l'extrem rodó ha d'estar al costat marcat a la pantalla de seda
PAS 3.2 Soldar PCB principal
Es solden els components següents:
-
CMODS6 (Cmod S6 FPGA)
Hi hauria d'haver-hi capçaleres de pins incloses. Soldeu-los al PCB
-
ESP (Geekcreit 30 Pin ESP32 Development)
Utilitzeu capçaleres femenines i soldeu-les al PCB
-
DCDC1 - DCDC4 (DC-DC 5V 4A)
- Utilitzeu 4 pins de la capçalera del pin i soldeu el convertidor DC-DC directament a la placa
- Aneu amb compte amb l’orientació, perquè coincideixi amb la pantalla de seda
- POWER_TEST (presa DC 5,5 x 2,1 mm)
-
D1 (1N5400)
Aneu amb compte amb l’orientació, la línia blanca del díode ha d’estar al mateix costat que la línia de la pantalla de seda
-
POWER (PCB femella endoll XT30PB)
Aneu amb compte amb l'orientació, l'extrem rodó ha d'estar al costat marcat a la pantalla de seda
-
C1, C3, C4, C6, C7, C9, C10, C11 (220uf 16V)
Aneu amb compte amb l'orientació, la línia blanca del condensador ha d'estar al costat oposat del plus a la pantalla de seda
- C2, C5, C8, C12 (100nf 50V)
-
IC1 - IC4 (74HCT04)
Aneu amb compte per alinear el retall del CI amb el marcatge de la pantalla de seda
PAS 3.3 Cola calenta
El PCB principal girarà molt ràpidament. Per tant, hem d’enganxar els condensadors (C1, C3, C4, C6, C7, C9, C10, C11) al PCB per evitar problemes. Simplement utilitzeu una cola calenta per a això.
Pas 4: prepareu tires

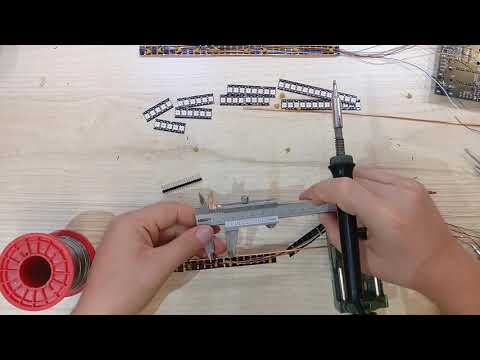



PAS 4.1 Tallar la tira a trossos
Traieu la protecció contra l'aigua amb unes tisores.
Necessitem quatre ales i cada ala conté quatre grups. Un WING és especial, té un LED més que els altres.
ALA1:
- G1: 5 LED (el grup més exterior)
- G2: 6 LEDs
- G3: 8 LEDs
- G4: 14 LEDs
WING2 - WING4:
- G1: 5 LED (el grup més exterior)
- G2: 6 LEDs
- G3: 8 LEDs
- G4: 13 LEDs
Per tant, necessitem 129 LEDs i la nostra tira té 144, de manera que tenim certa tolerància a un tall incorrecte;-) En el pitjor dels casos, podeu soldar el tall.
Tallar el més centrat possible entre els LED.
PAS 4.2 Soldeu els cables a la tira LED
A cadascun dels segments de tires de LED es solden dos cables de 30AWG al rellotge i el pin de dades. Aquests són els dos passadors del centre. Aneu amb compte de soldar-los a l'entrada de la tira LED. Normalment, les fletxes mostren la direcció del flux de dades. Els cables han de tenir al voltant de mig metre de llargada
Retalleu-ho tot de l'altre costat de la tira per evitar un curt entre les dades i els passadors de rellotge dels diferents grups quan juntem els WING.
PAS 4.3 Condensadors de soldadura
A cada grup es solden dos condensadors (100nf 50V) a la part posterior dels segments de tira LED a cada extrem. Per a G4 també se'n solda un al centre. Els cables haurien de passar per sota dels condensadors per deixar una mica d’espai però no massa.
PAS 4.4 Poseu els WING junts
Per a cada WING conduïu els cables de G1 a G2 i després aquests cables a través de G3 i el mateix amb G4.
PAS 4.4 Soldeu els grups junts
Ara necessitem el cable de coure (cable de 2,5 mm2 de fil únic / rígid). Talleu-lo en vuit trossos d’uns ~ 30cm de longitud. Retireu l'aïllament de tots els cables. Estirar els cables tant com sigui possible. Podeu fixar un extrem amb una pinça de cargol i subjectar l’altre amb unes alicates planes i després colpejar-les amb un martell.
Fixeu el cable per un costat per facilitar-ne la feina. Després, soldeu-hi el primer grup. Alineeu el segment de la tira LED amb el cable i soldeu-lo per un costat als dos condensadors. El cable ha de quedar pla a la tira LED. Continueu amb el grup següent. Aneu amb compte que la distància entre dos grups de LED sigui també de 7 mm. Al final, tots els LED haurien de tenir el mateix buit entre ells. Continueu amb els altres dos grups. A l'últim grup, heu soldat els tres condensadors al cable.
A continuació, talleu el cable al final. Continueu amb un altre cable a l'altre costat de la tira.
Ara s’ha acabat el primer ALA! Feu el mateix per a les altres tres ales.
PAS 4.5 Doble els condensadors
Simplement doblegueu-les totes per deixar les tires fines.
Pas 5: soldeu les tires al PCB principal




PAS 5.1 Comproveu la polarització
Primer hem de conèixer la polarització de la tira LED. Dit d’una altra manera: on 5V i terra són relatius al PCB. Això depèn realment de la tira LED que tingueu i pot ser de qualsevol manera.
Mantingueu un WING al PCB principal. Les fletxes de la tira LED han d’apuntar al centre de la placa. Mireu ara si hi ha 5V a la part DATES o al rellotge dels passadors.
Si el 5V està al costat de les dades, sou bo i podeu utilitzar el coure de 2,5 mm2 per soldar la tira LED directament al PCB.
Si no, heu d’utilitzar un cable de 22AWG per ratllar els dos costats. Per tant, soldeu el cable a la tira LED i ratlleu el costat esquerre i dret i soldeu-lo al PCB.
PAS 5.2 Soldar el cable de 2,5 mm2
Utilitzeu la resta del cable de coure de 2,5 mm2 i retireu-ho tot. Soldeu-los a la part superior del PCB. Talleu el filferro soldat a la mateixa alçada al voltant d’1cm.
PAS 5.3 Soldeu el primer ALA
Utilitzeu el WING més llarg i col·loqueu-lo al PCB (LEDs1) tal com es mostra a la pantalla de seda. Soldeu-lo als cables de 2,5 mm2. Feu connexions molt fortes, això veurà molta força durant la rotació. A continuació, connecteu els cables del grup 1 a les dades G1 i al rellotge G1.
No oblideu soldar la connexió d’alimentació tal com s’ha descrit anteriorment.
Connecteu l'ESP32 i l'FPGA (48 i 1 es troba al costat marcat) i alimenteu la placa amb la font d'alimentació.
Els LED més externs haurien de parpellejar en blau ara (poden trigar fins a 40 segons a fer-ho). Si no, comproveu si heu connectat CLOCK i DATA de la manera correcta.
PAS 5.4 Sensor d’efecte Hall
Soldeu una capçalera Pin femení (amb tres pins) al vestíbul. Més endavant hi connectarem el sensor.
Soldeu el sensor (sensor d’efecte Hall) a una capçalera de pin masculí. Els enllaços amb el senor i la capçalera del pin han de ser d’uns 25 mm.
PAS 5.5 Continueu amb la resta d’ALES
Per a LEDs2 - LEDs4 == WING2 - WING4 feu el mateix procés que amb WING1.
De tant en tant alimenteu el PCB i comproveu si tot parpelleja. El patró comença amb el led més exterior i entra cap a l'interior i torna a començar.
PAS 5.6 Saldo
Intenteu equilibrar el PCB principal al centre amb un objecte punxegut. Si un costat pesa més, intenteu afegir soldadura a l’altre costat. No ha de ser perfecte, però un desequilibri excessiu produirà molta vibració durant el funcionament, cosa que pot provocar problemes mecànics.
Pas 6: primer pinteu

Pas 6.1: trepant
Hem de fer alguns forats:
A la placa de MDF de 500 * 500 necessitem dos forats. Mireu el fitxer drill_wood_500_500.pdf i practiqueu els forats segons el pla.
A la placa de MDF de 500 * 100 necessitem molts forats. Per tant, imprimiu el fitxer drill_wood_500_100_A4.pdf i alineeu-lo al tauler. Simplement foradeu on hi ha els forats marcats al paper.
Pas 6.2: Pintar
Pinta un costat de cada fusta. Per a la placa de MDF de 500 x 500, és el costat que heu perforat.
Pinteu les dues cares de la fusta de 100x500.
També podeu pintar les cantonades de metall de negre. Això quedarà millor;-)
La resta serem pintats quan ho haguem muntat tot (la part exterior de la caixa).
Pas 7: Muntatge mecànic

Pas 7.1 Muntar la placa del controlador del motor
El PCB està muntat a la placa MDF de 100 x 500. Utilitzeu els separadors (espaciador M3 de 12 mm) i alguns cargols i femelles m3.
Pas 7.2 Muntar els suports
Munteu els dos suports (muntura del motor 775) a la placa MDF de 100 x500 amb cargols M4.
Pas 7.3 Prepareu el titular
Cal desactivar les dues barres (rodaments 6803ZZ). Només necessitem els dos anells exteriors.
Soldar 22AWG cables a cadascun dels anells. Un de negre i un de vermell.
Agafeu les peces impreses en 3D del suport i munteu-les.
Introduïu les set femelles M3 als seus forats respectius i feu lliscar l'anell amb el fil vermell primer al suport, després l'espaiador i després l'anell amb el fil negre. Afegiu la tercera peça per sobre i introduïu els cargols.
Tallar els dos cables a una distància de 2 cm i soldar-hi el jeck (cable macho endoll XT30). El cable negre es dirigeix cap al costat coixinat.
Pas 7.4 Muntar el motor
Cargoleu el motor (DC Motor 775) al suport del motor al mig de la placa MDF 100 x500.
Muntar el suport al motor i cargolar-lo fortament.
Pas 7.5 Instal·leu els pinzells
Tenia previst utilitzar un raspall Dremel (Carbon Brushes Dremel 4000). Necessitem utilitzar un altre carbó (raspalls de carboni motor) perquè el carbó dels raspalls Dremel té una resistència massa alta. Ho vaig passar per alt en el procés de desenvolupament. Per tant, fem servir els raspalls del motor i els polim a la mida dels raspalls dremel.
Talleu el cable del raspall del motor a 5 mm de distància del carbó.
A continuació, fem servir paper de sorra per retallar el carbó fins a les dimensions següents: 8,4 x 6,3 x 4,8 mm
Un costat del raspall del motor fa 6,1 mm, de manera que només necessitem polir dos costats.
Podeu provar si llisca fàcilment al porta-raspalls, doncs està bé.
També intenteu polir una corba a la part superior per millorar la connexió amb els anells metàl·lics.
Soldeu un fil de 22AWG al carbó per a tots dos carbons. Utilitzeu un fil vermell i un negre. Introduïu la molla del raspall dremel.
Introduïu els pinzells al porta-raspalls. El raspall amb el fil vermell va a la part superior. La part superior del suport és una mica més gruixuda. Aneu amb compte que les dues molles no es toquin.
Munteu el suport a la base amb femelles i cargols m3.
Munteu la base del suport del raspall al suport de motor secund encaixat. Utilitzeu cargols i femelles M4 inclosos amb el suport.
El motor hauria de poder girar lliurement.
Guieu els dos cables entre els dos suports.
Talleu els dos cables de manera que puguin arribar al PCB i soldeu-hi el jeck (cable macho XT30). El cable negre va al costat corbat.
Soldeu dos cables de 22AWG als motors i talleu-los a distància per arribar fàcilment a la PCB i soldeu-hi el jeck (cable femella XT30). El cable negre va al costat corbat.
Pas 8: finalitzeu
Recomanat:
Un vell carregador? No, és un amplificador i pedal per a auriculars de guitarra de tots els tubs RealTube18: 8 passos (amb imatges)
")
Un vell carregador? No, és un amplificador i un pedal per a guitarra de tots els tubs RealTube18: VISIÓ GENERAL: què fer durant una pandèmia, amb un carregador de bateria de níquel-cadmi obsolet i tubs de buit de ràdio de cotxe obsolets de més de 60 anys que han de ser reciclats? Què tal si heu de dissenyar i construir una bateria d’eines comuna només de tub, de baixa tensió i comuna
Pantalla tàctil Macintosh - Mac clàssic amb un iPad Mini per a la pantalla: 5 passos (amb imatges)
")
Pantalla tàctil Macintosh | Mac clàssic amb un iPad Mini per a la pantalla: Aquesta és la meva actualització i disseny revisat sobre com substituir la pantalla d'un Macintosh vintage per un iPad mini. Aquest és el sisè d'aquests que he fet al llarg dels anys i estic bastant content de l'evolució i el disseny d'aquest! El 2013, quan vaig fer
QeMotion: seguiment de moviment per a tots els auriculars: 5 passos (amb imatges)
")
QeMotion: seguiment del moviment per a tots els auriculars: visió general: aquest dispositiu us permet utilitzar el moviment del cap per provocar esdeveniments bàsicament en qualsevol videojoc. Funciona rastrejant el moviment del cap (o els auriculars pel que fa a això) i activant les tecles de premsa per a determinats moviments. Així que el vostre comp
Què cal fer amb tots aquests CD AOL: 6 passos (amb imatges)
")
Què fer amb tots aquells CD AOL: volia fer alguna cosa amb CD de plàstic, a més d’afegir-los al recinte de terra: la meva solució era utilitzar-los per construir construccions geomètriques en 3D. Aquí descric com vaig fer servir 12 CD per construir un Dodecaedre. També vaig construir un Icosaedre trucat de 32 CD, 1
Piratejar Canon EOS 300D per confirmar el focus amb tots els objectius, permanentment: 5 passos (amb imatges)
")
Piratejar Canon EOS 300D per confirmar el focus amb tots els objectius, de manera permanent: bé, bé, podeu fer-ho fàcilment utilitzant diversos adaptadors xip per a diversos muntatges d’objectius, però, què us sembla si modifiqueu permanentment la vostra càmera per fer el mateix i eviteu pagar més per diversos? adaptadors? M'encanta el meu 300D però no tinc cap objectiu EF / S