")
Taula de continguts:
- Subministraments
- Pas 1: Configuració de la impressora 3D
- Pas 2: Creeu el vostre propi Otto DIY +
- Pas 3: codifiqueu el vostre propi Otto
- Pas 4: Codi principal per a l'aplicació Bluetooth
- Pas 5: copieu, amplieu, personalitzeu, modifiqueu, remescleu i compartiu
- Pas 6: Configuració de Bluetooth (BT) (només si la sincronització no funciona correctament):
- Autora John Day day@howwhatproduce.com.
- Public 2024-01-30 08:11.
- Última modificació 2025-01-23 14:37.




La naturalesa de codi obert d’Otto permet l’educació STEAM oberta, recopilem comentaris de diferents tallers i escoles de tot el món que ja utilitzen el bricolatge Otto a la seva aula i, en funció de l’obertura d’aquests llocs educatius, organitzem el material de la lliçó i també el compartim.
CC-BY-SA Creative Commons llicència significa que podeu copiar de franc, però heu de donar crèdits a l'original posant el nostre lloc web (https://www.ottodiy.com/)
Otto DIY + és la versió avançada i millorada de l’original #OttoDIY, la idea és tenir les mateixes característiques bàsiques: robot DIY + programació i control Bluetooth + servomotors d’engranatges metàl·lics + recarregables + canviant de mode mitjançant sensor tàctil + sensor de so + moviments de llum + altres sortides + …?
El més emocionant és que estem fent un desenvolupament obert amb els creadors i pirates informàtics de tot el món, de manera que estem oberts a idees, no només d’experts amb els quals pugueu acompanyar-nos, comentaris, intercanvis socials, proves o qualsevol altra contribució que pugueu pensar.
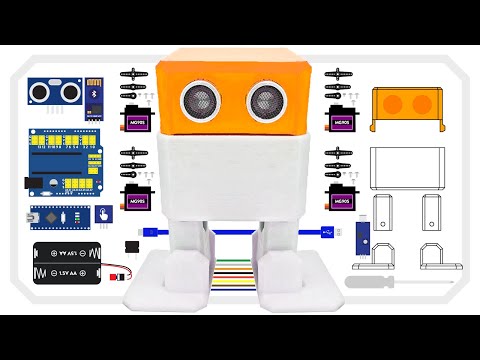
Subministraments
1 × Arduino Nano
1 × mòdul Bluetooth HC-06 o HC-05
1 × E / S Arduino Nano Shield; es podria utilitzar una mini taula de treball, però molt més per cable
1 cable USB-A a Mini-USB
4 × Micro servo MG90s (metall)
1 × Buzzer
10 × cables de pont femení / femení
1 × sensor tàctil
1 × sensor de so
Activació / desactivació del microinterruptor 1 × 8x8mm
1 × Bateria LiPo de 3,7 V amb reforç a 5 V (opcional) 1 × Tornavís Phillips 1 impressora 3D (o utilitzeu un servei o un amic;))
Pas 1: Configuració de la impressora 3D

És important llegir el primer bricolatge anterior de Otto DIY per familiaritzar-se amb els conceptes bàsics de la construcció d’un robot bípede. Obteniu totes les parts, codis i biblioteques STL d’impressió 3D per Bluetooth anant aquí https://wikifactory.com/+OttoDIY/otto-diy- a la pestanya Fitxers
- Es recomana utilitzar una impressora 3D FDM amb material PLA.
- No necessiteu res ni suports.
- Resolució: 0,15 mm
- Densitat d'ompliment 20%
Necessiteu ajustar la mida per fer alguns canvis al fitxer font realitzat a Autodesk Fusion 360
O Tinkercad aquí
Pas 2: Creeu el vostre propi Otto DIY +



al següent vídeo i imatges podeu obtenir una referència sobre com construir Otto DIY +, degut a algunes noves versions del disseny del robot.
Pas 3: codifiqueu el vostre propi Otto





Per tant, fins a aquest punt hauríeu de tenir un Otto 3D imprès, muntat, ara una mica de programació per tenir biblioteques i Arduino instal·lats al vostre PC.
El més fàcil de codificar el vostre propi Otto és utilitzar el nostre programari Blockly; un programador més avançat pot provar directament Arduino IDE.
Pas 4: Codi principal per a l'aplicació Bluetooth




L’Otto ha d’estar preparat per rebre ordres a través de Bluetooth i, per a això, ha de posar el codi principal dins del seu cervell
- Copieu les biblioteques Otto a la carpeta Arduino IDE
- Pengeu l'aplicació.ino sketch a Otto
-
Descarregueu i instal·leu l’APP al vostre telèfon intel·ligent. Google Play Store (https://play.google.com/store/apps/details?id=com.ottodiy)
- Ara podeu connectar el mòdul i activar Bluetooth al telèfon.
- Cerqueu Otto i vincleu l'adreça / el nom de Bluetooth
- Ara podeu utilitzar l’APP per controlar Otto.
- Juga amb les noves funcions i, si no, pot ser que hagis de reconfigurar el teu BT, però no et preocupis, també és fàcil;)
Pas 5: copieu, amplieu, personalitzeu, modifiqueu, remescleu i compartiu




Consulteu aquesta publicació del bloc per trobar idees sobre com personalitzar el vostre propi robot
Uniu-vos a la comunitat Otto Builder! Seguiu-nos, doneu-me un m'agrada i compartiu la vostra creativitat, podríeu aparèixer aquí compartint el vostre robot a qualsevol xarxa social
Facebook i Instagram
utilitzeu l'etiqueta #ottodiy a la vostra publicació i etiqueteu o mencioneu @OttoDIY
Formeu part d’aquesta comunitat amable de constructors, professors i fabricants de robots. Benvingut a la nostra comunitat Otto Builder.
Pas 6: Configuració de Bluetooth (BT) (només si la sincronització no funciona correctament):
Aquesta configuració NOMÉS es necessita per als mòduls que no vénen amb la velocitat de transmissió estàndard de 9600, com saber-ho? només cal que proveu primer el codi i l’APP, si el telèfon no s’aparella amb Otto o respon a les ordres, probablement vol dir que el vostre mòdul té una velocitat de transmissió diferent, de manera que cal configurar-lo
El codi BT té una velocitat de transmissió de 115200, de manera que el mòdul BT ha de coincidir amb aquesta velocitat per poder comunicar-se amb Arduino Nano mitjançant la interfície sèrie (UART).
Per a HC-05: 38400 o 115200
1. Pengeu primer l'esbós HC05_BT_config.ino al Nano i, a continuació, desconnecteu Nano de l'USB.
2. Ara connecteu BT a Arduino Nano tal com es mostra al diagrama, però no connecteu VCC.
TX - RX
RX - TX
VCC - 5V
GND - GND
3. Connecteu l'USB a Nano i, a continuació, connecteu VCC perquè BT entri en mode AT. El LED de BT hauria de començar a parpellejar més lentament, aproximadament un cop cada 2 segons. (Si això no funciona, intenteu mantenir premut el botó del mòdul BT mentre connecteu VCC).
Obriu el monitor sèrie en IDE, configureu la velocitat de transmissió a 9600 i el final de línia a NL i CR.
Escriviu AT i premeu Retorn; (si tot està bé, BT hauria de respondre amb OK i després introduir les ordres següents:
AT + NAME = Zowi "establint el nom"
AT + PSWD = 1234 "contrasenya de sincronització"
AT + UART = 115200, 1, 0 "velocitat en bauds"
AT + POLAR = 1, 0 "permetent que el pin STATE s'utilitzi com a restabliment per programar arduino sobre BT"
Ara aneu al pas APP
Si hi ha algun problema, consulteu aquesta instrucció per modificar els valors predeterminats del mòdul Bluetooth HC-05 mitjançant comandaments AT
www.instructables.com/id/Modify-The-HC-05-…
Per a HC-06: 9600 o 115200
Per al mòdul HC-06 BT les coses són una mica més senzilles perquè el mòdul sempre està en mode de comandament AT quan no està connectat a res. Però l’inconvenient és que el mòdul HC-06 no es pot utilitzar per pujar esbossos a Arduino perquè no s’ha restablert. Per configurar el mòdul
1. pengeu aquest esbós HC06_BT_config.ino al vostre Nano
1. desconnecteu l'USB
2. connecteu el mòdul BT a Arduino Nano així:
TX - RX
RX - TX
VCC - 5V
GND - GND
3. Enceneu el Nano i, al cap d’uns 10-15 segons, tot hauria d’estar acabat i el BT hauria d’estar configurat (el LED13 hauria de començar a parpellejar).
Si hi ha algun problema, consulteu aquesta instrucció
EN cas que hi hagi alguna pregunta, no rebo notificacions per comentaris instructius, per tant, si hi ha alguna cosa, publiqueu a la nostra comunitat
Recomanat:
Com construir el robot SMARS - Arduino Smart Robot Tank Bluetooth: 16 passos (amb imatges)
")
Com construir el robot SMARS: Arduino Smart Robot Tank Bluetooth: aquest article compta amb el patrocini orgullós de PCBWAY.PCBWAY fabrica PCB de prototipatge d’alta qualitat per a persones de tot el món. Proveu-ho per vosaltres mateixos i obteniu 10 PCB per només 5 dòlars a PCBWAY amb una qualitat molt bona, gràcies PCBWAY. La protecció del motor per a Arduino Uno
Robot Arduino Otto amb màquina estatal: 4 passos

Arduino Otto Robot With State Machine: Visió general del projecte En aquest projecte, vull mostrar-vos una manera de programar el robot Otto, que és un robot de bricolatge basat en Arduino. Utilitzant YAKINDU Statechart Tools (gratuïta per a empreses no comercials), podem utilitzar fàcilment màquines d’estats per modelar gràficament el comportament
Fàcil interfície RFID MFRC522 amb Arduino Nano: 4 passos (amb imatges)
")
Interfície RFID MFRC522 fàcil amb Arduino Nano: el control d’accés és el mecanisme dels camps de seguretat física i seguretat de la informació, per restringir l’accés / entrada anònima als recursos d’una organització o d’una àrea geogràfica. L'acció d'accedir pot significar consumir, entrar o utilitzar
El robot Butter: el robot Arduino amb crisi existencial: 6 passos (amb imatges)
")
The Butter Robot: the Arduino Robot With Existential Crisis: Aquest projecte es basa en la sèrie animada "Rick and Morty". En un dels episodis, Rick fa un robot l'únic propòsit del qual és portar mantega. Com a estudiants de Bruface (Facultat d’Enginyeria de Brussel·les), tenim una tasca per a la meca
[Arduino Robot] Com fer un robot de captura de moviment - Thumbs Robot - Servomotor - Codi font: 26 passos (amb imatges)
![[Arduino Robot] Com fer un robot de captura de moviment - Thumbs Robot - Servomotor - Codi font: 26 passos (amb imatges)](https://i.howwhatproduce.com/images/001/image-1599-93-j.webp "[Arduino Robot] Com fer un robot de captura de moviment - Thumbs Robot - Servomotor - Codi font: 26 passos (amb imatges)")
[Robot Arduino] Com fer un robot de captura de moviment | Thumbs Robot | Servomotor | Codi font: Thumbs Robot. S'ha utilitzat un potenciòmetre de servomotor MG90S. És molt divertit i fàcil! El codi és molt senzill. Només ronda les 30 línies. Sembla una captura de moviment. Deixeu qualsevol pregunta o comentari. [Instruccions] Codi font https: //github.c