")
Taula de continguts:
- Pas 1: Impressió i muntatge
- Pas 2: nova base
- Pas 3: poca correcció
- Pas 4: PCB casolà
- Pas 5: Gravat de PCB
- Pas 6: fresat de PCB
- Pas 7: Fresat de PCB: Obteniu fitxers per a la producció
- Pas 8: fresat de PCB: el procés de fresat
- Pas 9: Fresar PCB: netejar el treball
- Pas 10: Soldar el component
- Pas 11: Firmware i programari
- Pas 12: proves
- Pas 13: continueu muntant
- Pas 14: calibració
- Pas 15: Primera prova de mandarí
- Pas 16: gràcies
- Autora John Day day@howwhatproduce.com.
- Public 2024-01-30 08:14.
- Última modificació 2025-01-23 14:38.


Hola a tots, Em vaig a adonar del famós escàner 3D Ciclop.
No hi ha tots els passos que s’expliquen bé al projecte original.
Vaig fer algunes solucions per simplificar el procés, primer imprimeixo la base i després restilitzo la PCB, però continua.
Pas 1: Impressió i muntatge
Per a la peça de muntatge, la millor solució és fer referència a la documentació original
www.bq.com/it/support/ciclop/support-sheet
en multilingüe i ben explicat.
Les parts impreses són bastant senzilles de muntar.
També hi ha molts vídeos, l’oficial és aquest.
Pas 2: nova base


L’única peça difícil de trobar és la base de plexiglàs, de manera que en dissenyo una de imprimible amb la meva impressora 3D Anet A8.
Podeu trobar el projecte aquí.
Pas 3: poca correcció


Un altre problema és que probablement pugueu trobar un làser de baix cost que no s’adapti al suport original.
El làser comú és el làser de 12 mm.
Per tant, podeu utilitzar aquesta variant impresa.
Un altre problema és aturar la part giratòria, crec que la millor solució és utilitzar una goma, com podeu veure a les imatges.
Pas 4: PCB casolà

Per a aquest projecte, vaig fer que un PCB fos totalment compatible amb l’original. L’exploració Zum és més complexa, però no s’utilitzen totes les funcions addicionals.
La meva versió és per a Arduino Nano, de manera que és més que l’original.
Si no teniu habilitat per produir PCB automàticament, podeu utilitzar el fitxer gerber que podeu trobar a l’article per enviar-lo a la fàbrica que produeix PCB com
Pas 5: Gravat de PCB
Mai he utilitzat aquesta tècnica, però afegeixo a aquest pas el fitxer svg o PDF per a la producció.
Pas 6: fresat de PCB
Utilitzo aquesta tècnica per a la meva producció personal, sobre això escric 2 articles:
El primer és una guia pas a pas per crear un CNC portàtil perfecte i optimitzat per al fresat CNC.
Aquí la guia.
Una guia anterior que explica pas a pas com utilitzar la màquina, com crear un PCB i com crear un fitxer per a la producció.
Aquí l'altra guia.
Pas 7: Fresat de PCB: Obteniu fitxers per a la producció
Afegeixo aquí el fitxer de producció, el gerber o directament el gcode de la fresadora
Pas 8: fresat de PCB: el procés de fresat



Primer, molreu el fons de coure i, a continuació, foradeu el forat.
Pas 9: Fresar PCB: netejar el treball


Utilitzeu paper de sorra per fer el tauler pla i net.
Pas 10: Soldar el component



Per a aquest tauler utilitzo:
- Arduino Nano
- A4988 Controlador pas a pas
- 2x 1k resistència
- 1x resistència de 10k
- Transistor 2x 2n2222
- 5,5 Barril per a la tensió d’entrada
Faig servir una font d’alimentació de 12v 2A (al barril) per alimentar un conductor pas a pas.
Que el connector USB és suficient per a làser i Arduino.
Pas 11: Firmware i programari

Podeu descarregar el firmware per carregar-lo a l’Arduino des d’aquí
github.com/bqlabs/horus-fw
Com es descriu a la guia, la càmera és una càmera web Logitech C270 HD, el controlador aquí.
support.logitech.com/en_ca/product/hd-webca…
Podeu trobar programari aquí.
horus.readthedocs.io/en/release-0.2/
si teniu problemes per descarregar-lo, podeu anar aquí
github.com/LibreScanner/horus/releases
Pas 12: proves

Primer ho provo tot sense càmera i funciona bé.
Podeu utilitzar el fitxer INO per comprovar el làser i el pas a pas
Pas 13: continueu muntant


Del que afegeixo càmera, fixo el tauler i afegeixo un paper negre a la part superior de la plataforma.
Pas 14: calibració
Hi ha molts vídeos sobre el calibratge, aquest pas és molt senzill.
M’adono d’aquest mínim vídeo amb el meu nou Ciclop.
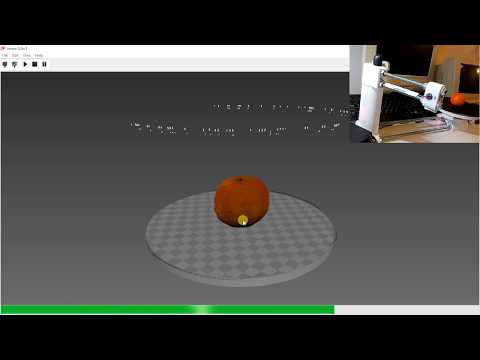
Pas 15: Primera prova de mandarí
En aquest vídeo només escanejo l'objecte, però per tenir una bona imatge heu de fer un processament posterior amb un programari com MeshLab.
Pas 16: gràcies
Ara comenceu a escanejar-ho tot.
Recomanat:
Motor pas a pas controlat Motor pas a pas sense microcontrolador: 6 passos

Motor pas a pas controlat pel motor pas a pas sense microcontrolador. Aquest projecte no requereix cap circuit complex ni un microcontrolador. Així doncs, sense més, comencem
Motor pas a pas controlat pel motor pas a pas sense microcontrolador (V2): 9 passos (amb imatges)
: 9 passos (amb imatges)")
Motor pas a pas controlat amb motor pas a pas sense microcontrolador (V2): en una de les meves instruccions anteriors, us vaig mostrar com controlar un motor pas a pas mitjançant un motor pas a pas sense microcontrolador. Va ser un projecte ràpid i divertit, però va venir amb dos problemes que es resoldran en aquest instructiu. Llavors, enginy
Locomotora model controlada per motor pas a pas - Motor pas a pas com a codificador rotatiu: 11 passos (amb imatges)
")
Locomotora controlada per motor pas a pas | Motor pas a pas com a codificador rotatiu: en una de les instruccions anteriors, vam aprendre a utilitzar un motor pas a pas com a codificador rotatiu. En aquest projecte, ara utilitzarem aquest motor pas a pas encodador giratori per controlar una locomotora model mitjançant un microcontrolador Arduino. Així, sense fu
Controleu l'ordinador amb un motor pas a pas !: 9 passos (amb imatges)
")
Controlar l’ordinador amb un motor pas a pas En aquest instructiu, aprendrem com el podem utilitzar per controlar el nostre equip. Així doncs, sense més, comencem
Motor pas a pas controlat Motor pas a pas com a codificador rotatiu: 11 passos (amb imatges)
")
Motor pas a pas controlat Motor pas a pas com a codificador rotatiu: teniu un parell de motors pas a pas al voltant i voleu fer alguna cosa? En aquesta instrucció, fem servir un motor pas a pas com a codificador rotatiu per controlar la posició d’un altre motor pas a pas mitjançant un microcontrolador Arduino. Així doncs, sense més preàmbuls, anem a