
Taula de continguts:
- Pas 1: coses que necessitem
- Pas 2: Instal·lació del programari
- Pas 3: Instal·leu la diapositiva de material: utilitzeu la placa de connexió per connectar l’estator i la diapositiva de material
- Pas 4: Instal·leu l'estator UArm (amb lliscament de material): Fixeu l'estator UArm a la cinta transportadora
- Pas 5: instal·leu el sensor d'ultrasons: fixeu el sensor d'ultrasons a la cinta transportadora
- Pas 6: Instal·leu la placa de control principal: fixeu la placa de control principal a la base de la cinta transportadora
- Pas 7: Instal·leu l'estator UArm: fixeu un altre estator a la cinta transportadora
- Pas 8: Connecteu el sensor d'ultrasons: introduïu el cable del sensor d'ultrasons al D10-D11 de la placa de control principal
- Pas 9: Connecteu el cercador de línies: introduïu el cable del cercador de línies al D12-D13 de la placa de control principal
- Pas 10: Connecteu el sensor de color: introduïu el cable del sensor de color a la IIC de la placa de control principal
- Pas 11: Connecteu la pantalla LCD: introduïu el cable LCD a la IIC de la placa de control principal
- Pas 12: Connecteu la cinta transportadora: introduïu el cable de la cinta transportadora a la unitat del motor de la placa de control principal
- Pas 13: Instal·leu UArm Swift Pro: col·loqueu UArm Swift Pro a l'estator de manera ferma
- Pas 14: Connecteu el COM de la UArm Swift Pro: utilitzeu el cable TYPE-C per connectar la UArm Swift Pro i la placa de control
- Pas 15: Connecteu la font d'alimentació d'UArm Swift Pro: enllaceu el Two Swift Pro amb la terminal d'alimentació
- Pas 16: Visió general
- Pas 17: operació
- Pas 18: restabliment del microprogramari
- Pas 19: Reescriptura del microprogramari
- Pas 20: Firmware reescrit-1: descarregueu el firmware
- Pas 21: Firmware reescrit-2: connecteu Mega2560 a l'ordinador mitjançant un cable USB
- Pas 22: Firmware reescrit-3: descarregueu biblioteques externes i importeu la biblioteca
- Pas 23: Firmware reescrit-4: Obriu el firmware a l'IDE Arduino
- Pas 24: Firmware reescrit-4: envieu el firmware a Arduino Mega2560 amb els paràmetres
- Autora John Day day@howwhatproduce.com.
- Public 2024-01-30 08:14.
- Última modificació 2025-01-23 14:38.


Ei, nois, aquest instructiu us portarà a la instal·lació de la cinta transportadora. Si teniu experiència prèvia amb uArm, és bo provar aquesta cinta transportadora. Si no hi ha experiència prèvia, està totalment bé i els podreu conèixer tots dos ara. Aquesta cadena de muntatge simulada aporta molta més diversió, vegem com funciona el procés de selecció.
Pas 1: coses que necessitem
Maquinari:
1. Cinta transportadora i sensor de color * 1
2. Placa d'expansió inferior uArm 30P * 2
3. Adaptador de corrent de 12 V * 1
4. Cable USB tipus C * 2 i cable d'alimentació uArm * 1
5. Objecte objectiu (Cub vermell i verd i groc) * 1
6. Sensor d'ultrasons * 1
7. LCD * 1
8. Taula de control * 1
9. Diapositiva de materials * 1 i cercador de línies * 1
10. Placa de connexió * 1
11. uArm Swift Pro Stator * 2
Programari:
1. ID Arduino
2. conveyor_belt.ino per a Arduino Mega 2560
3. UArmSwiftPro_2ndUART.hex per a uArm
Pas 2: Instal·lació del programari

1. Descarregueu l'hex.
2. Descarregueu i extracteu XLoader.
3. Obriu XLoader i seleccioneu el port COM del vostre uArm al menú desplegable de la part inferior esquerra.
4. Seleccioneu el dispositiu adequat a la llista desplegable titulada "Dispositiu".
5. Comproveu que Xloader estableixi la velocitat de transmissió correcta per al dispositiu: 115200 per a Mega (ATMEGA2560).
6. Ara utilitzeu el botó navega a la part superior dreta del formulari per examinar el fitxer hexadecimal.
7. Un cop seleccionat el fitxer hexadecimal, feu clic a "Puja". El procés de càrrega normalment triga uns 10 segons a finalitzar. Un cop completat, apareixerà un missatge a l'extrem inferior esquerre de XLoader que us indicarà quants bytes s'han carregat. Si hi ha hagut un error, es mostrarà en lloc del total de bytes penjats. Els passos han de ser similars i es poden fer mitjançant el símbol del sistema.
Pas 3: Instal·leu la diapositiva de material: utilitzeu la placa de connexió per connectar l’estator i la diapositiva de material

Pas 4: Instal·leu l'estator UArm (amb lliscament de material): Fixeu l'estator UArm a la cinta transportadora
: fixeu l'estator UArm a la cinta transportadora")
Pas 5: instal·leu el sensor d'ultrasons: fixeu el sensor d'ultrasons a la cinta transportadora

Pas 6: Instal·leu la placa de control principal: fixeu la placa de control principal a la base de la cinta transportadora

Pas 7: Instal·leu l'estator UArm: fixeu un altre estator a la cinta transportadora

Pas 8: Connecteu el sensor d'ultrasons: introduïu el cable del sensor d'ultrasons al D10-D11 de la placa de control principal

Pas 9: Connecteu el cercador de línies: introduïu el cable del cercador de línies al D12-D13 de la placa de control principal

Pas 10: Connecteu el sensor de color: introduïu el cable del sensor de color a la IIC de la placa de control principal

Pas 11: Connecteu la pantalla LCD: introduïu el cable LCD a la IIC de la placa de control principal

Pas 12: Connecteu la cinta transportadora: introduïu el cable de la cinta transportadora a la unitat del motor de la placa de control principal

Pas 13: Instal·leu UArm Swift Pro: col·loqueu UArm Swift Pro a l'estator de manera ferma


Pas 14: Connecteu el COM de la UArm Swift Pro: utilitzeu el cable TYPE-C per connectar la UArm Swift Pro i la placa de control

Pas 15: Connecteu la font d'alimentació d'UArm Swift Pro: enllaceu el Two Swift Pro amb la terminal d'alimentació

Pas 16: Visió general

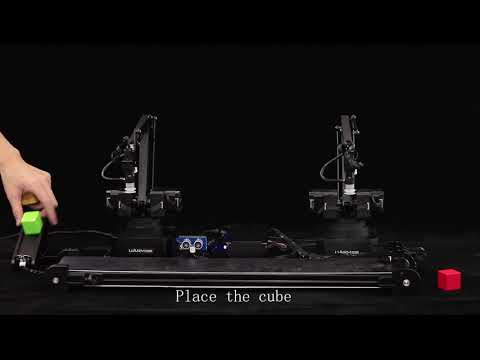
Pas 17: operació

1. Premeu el botó d'engegada de uArm.
2. Utilitzeu un adaptador de corrent de 12V per encendre tot el sistema.
3. Premeu el botó de restabliment del tauler de control per restablir el sistema.
4. Col·loqueu el cub de color a la diapositiva del material i espereu que uArm el reculli.
Pas 18: restabliment del microprogramari

En el primer pas, s’afegeix un firmware especial per a la cinta transportadora a uArm Swift Pro. uArm Studio no pot controlar-lo. Si voleu controlar uArm mitjançant uArm Studio, seguiu els passos següents per restaurar el firmware.
1. Connecteu uArm Swift Pro a l'ordinador, obriu XLoader i carregueu swiftpro3.2.0.hex.
2. Feu clic al botó "penja" per penjar l'hex a uArm Swift Pro.
Pas 19: Reescriptura del microprogramari
El firmware Arduino Mega2560 s’ha configurat abans d’enviar-lo. Si cal tornar a escriure el firmware, consulteu els passos següents.
Pas 20: Firmware reescrit-1: descarregueu el firmware
Descarregueu conveyor_belt.ino per a Arduino Mega 2560
Pas 21: Firmware reescrit-2: connecteu Mega2560 a l'ordinador mitjançant un cable USB

Pas 22: Firmware reescrit-3: descarregueu biblioteques externes i importeu la biblioteca

Baixeu biblioteques externes i importeu-la.
Pas 23: Firmware reescrit-4: Obriu el firmware a l'IDE Arduino

Pas 24: Firmware reescrit-4: envieu el firmware a Arduino Mega2560 amb els paràmetres

D’acord, així funciona. Gràcies pels vostres interessos en llegir els meus instruccions sobre com instal·lar la cinta transportadora.
Espero que gaudiu jugant amb uArm i Conveyor Belt. _
Creat per l'equip UFACTORY
Correu electrònic: info@ufactory.cc
Facebook: @ Ufactory2013
Web oficial: www.ufactory.cc
Recomanat:
Afegir una línia a un Boombox amb un reproductor de cinta: 5 passos

Afegir una línia a un Boombox amb un reproductor de cinta: ** Igual que amb tots els instructius, us poseu el vostre article / salut / qualsevol cosa a les vostres mans quan ho intenteu. Tingueu en compte els voltatges alts de la placa principal, el soldador en calent, etc. Si teniu cura i paciència, obtindreu èxit. ** Th
Construeix una mini cinta transportadora com a màquina Slinky: 7 passos (amb imatges)
")
Construeix una mini cinta transportadora com a màquina slinky: aquest petit projecte utilitza un motor engranatge groc per alimentar una cinta transportadora d’1 peu de longitud feta amb tub de pvc, fusta de pi 1 per 4 i tela d’artista (per a la cinta). Vaig passar per un parell de versions abans que comencés a funcionar, fent un mistak senzill i evident
Part 3: GPIO: Muntatge ARM: Seguidor de línia: TI-RSLK: 6 passos

Part 3: GPIO: Muntatge ARM: Seguidor de línia: TI-RSLK: Hola. Aquesta és la següent entrega on continuem utilitzant el conjunt ARM (en lloc d’un llenguatge de nivell superior). La inspiració d’aquest Instructable és el Laboratori 6 del Texas Learning Instruments Robotics System Learning Kit, o TI-RSLK. Farem servir el micròfon
Classificador de colors basat en cinta transportadora controlada TIVA: 8 passos

Classificador de colors basat en cinturons transportadors controlats TIVA: el camp de l’electrònica té una gran aplicació. Cada aplicació necessita un circuit diferent i un programari diferent, així com una configuració de maquinari. El microcontrolador és el model integrat incrustat en un xip en el qual es poden executar diferents aplicacions amb
Muntatge del muntatge de la càmera per al Destripador de llibres de Bkrpr.org: 10 passos

Muntatge del muntatge de la càmera per al Destripador de llibres de Bkrpr.org: documentació pas a pas per construir aquest muntatge de la càmera per anar al separador de llibres descrit a bkrpr.org i que es mostra aquí: bkrpr 1.0 flickr set. El muntatge del muntatge és bastant senzill. Necessitareu: + 2x - 3 " fins a 5 " cargols / cargols llargs + 1x - 2 i qu